? ? ? ?中風是目前造成成年人殘疾的首要原因。研究表明,在卒中后的6個月內進行及時有效的康復治療對患者恢復運動能力是至關重要的。近年來,越來越多的可穿戴外骨骼機器人走入臨床,有意探索康復機器人干預下的中樞神經系統的重建和運動能力的恢復。但與此同時,可穿戴機器人缺乏對使用者運動意圖認知的智能。因此,增強機器人的感知智能,提高人機交互共融性,是當前康復機器人技術面臨的重要挑戰。
? ? ? ?恰當的助力時機對于執行有效的外骨骼助力,保證使用者安全性等都至關重要。現有的研究已經充分證明了表面肌電信號在識別人體運動意圖的可行性。肌電信號是由肌肉收縮產生的生理電信號,其包含了與運動意圖相關的直接信息;同時,肌電信號相較于肢體運動具有一定的超前性。通過解碼該信號可以識別人的行為, 進而賦予外骨骼理解人的運動意圖的智能,從而避免外骨骼的控制延遲。然而,基于肌電信號的意圖識別方法但仍然面臨以下挑戰:(1)肌電幅值變化和電極偏移導致的不穩定性;(2)步態運動學預測的準確度。
B. Zhong, K. Guo, H. Yu, and M. Zhang, "Toward Gait Symmetry Enhancement via a Cable-Driven Exoskeleton Powered by Series Elastic Actuators," IEEE Robot. Automat. Lett., vol. 7, no. 2, pp. 786-793, 2022.
? ? ? ?張明明課題組長期以來一直致力于面向生活任務的智能、精準、閉環、高效的神經康復技術及器械的開發和研究。近期該團隊提出一種基于肌電信號預測連續下肢膝關節角度的解碼方法,即基于肌肉協同驅動的自適應模糊神經網絡預測模型(Muscle synergy- driven ANFIS model),實現了在不同步行速度下的膝關節角度的穩定連續預測。相關論文以《A Muscle Synergy-Driven ANFIS Approach to Predict Continuous Knee Joint Movement》為題發表于國際頂級期刊IEEE Transactions on Fuzzy Systems(IF=12.029)。
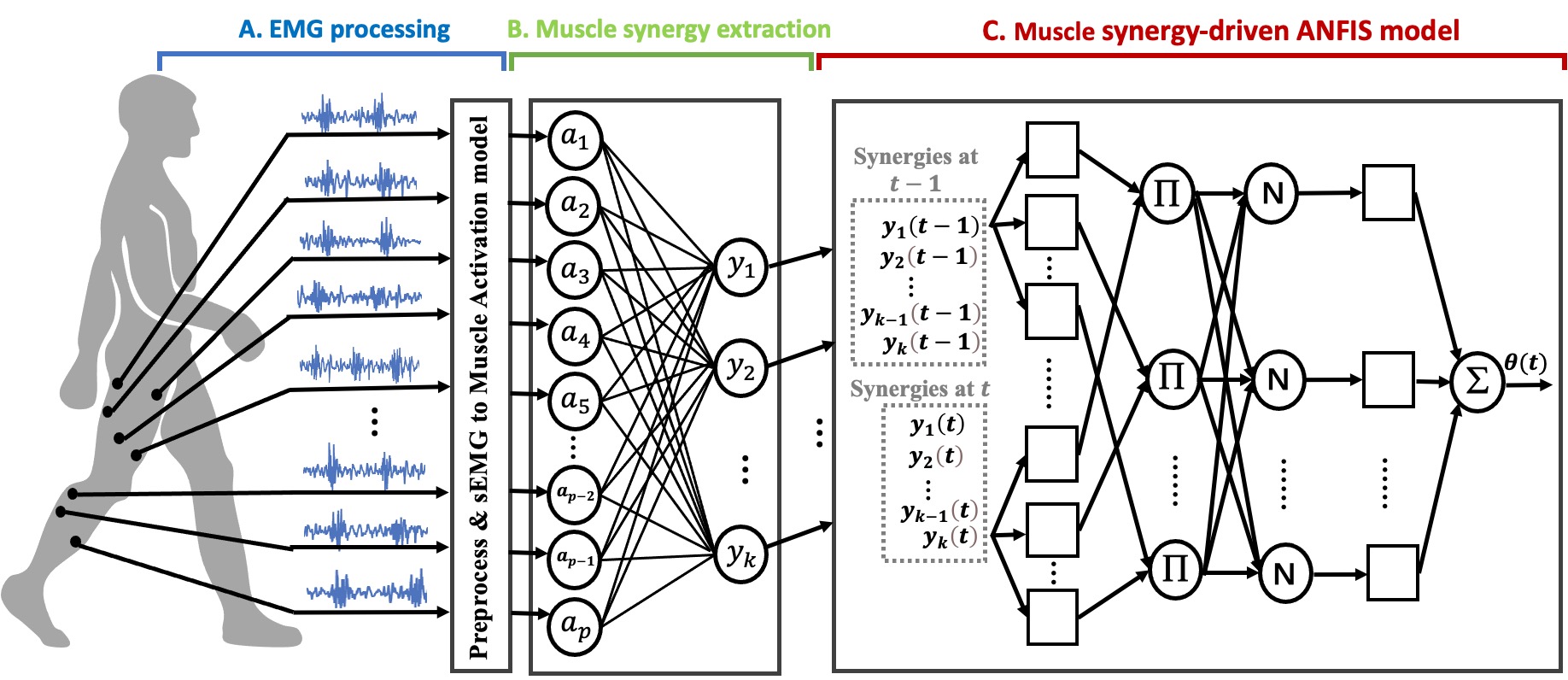
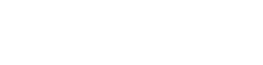
圖1. 膝關節角度預測算法框架
?
? ? ? ?本文首先利用多生理信號采集設備和人體光學運動捕捉設備同時獲取受試者在行走過程中的下肢表面肌電信號和膝關節角度信息。然后將肌電數據進行預處理和肌肉協同的提取。這樣的處理將原始的數值生理信息轉換成了能反應神經控制策略的特征信息,同時肌肉協同方法也具有更強的魯棒性和更高的計算效率。進而,以肌肉協同為輸入驅動ANFIS模型,對受試者連續的膝關節角度進行魯棒預測。
? ? ? ?通過5種不同速度的步行實驗表明, 本論文提出的Muscle synergy-driven ANFIS model的預測準確度達到相關系數為0.92±0.05,相比于目前基于當通道數值特征方法,預測準確性和計算效率均有顯著性提升。同時,肌肉協同作為肌肉激活度與人體運動間的橋梁, 本方法有效地建立了兩者的非線性關系,提高了模型的可解釋性。
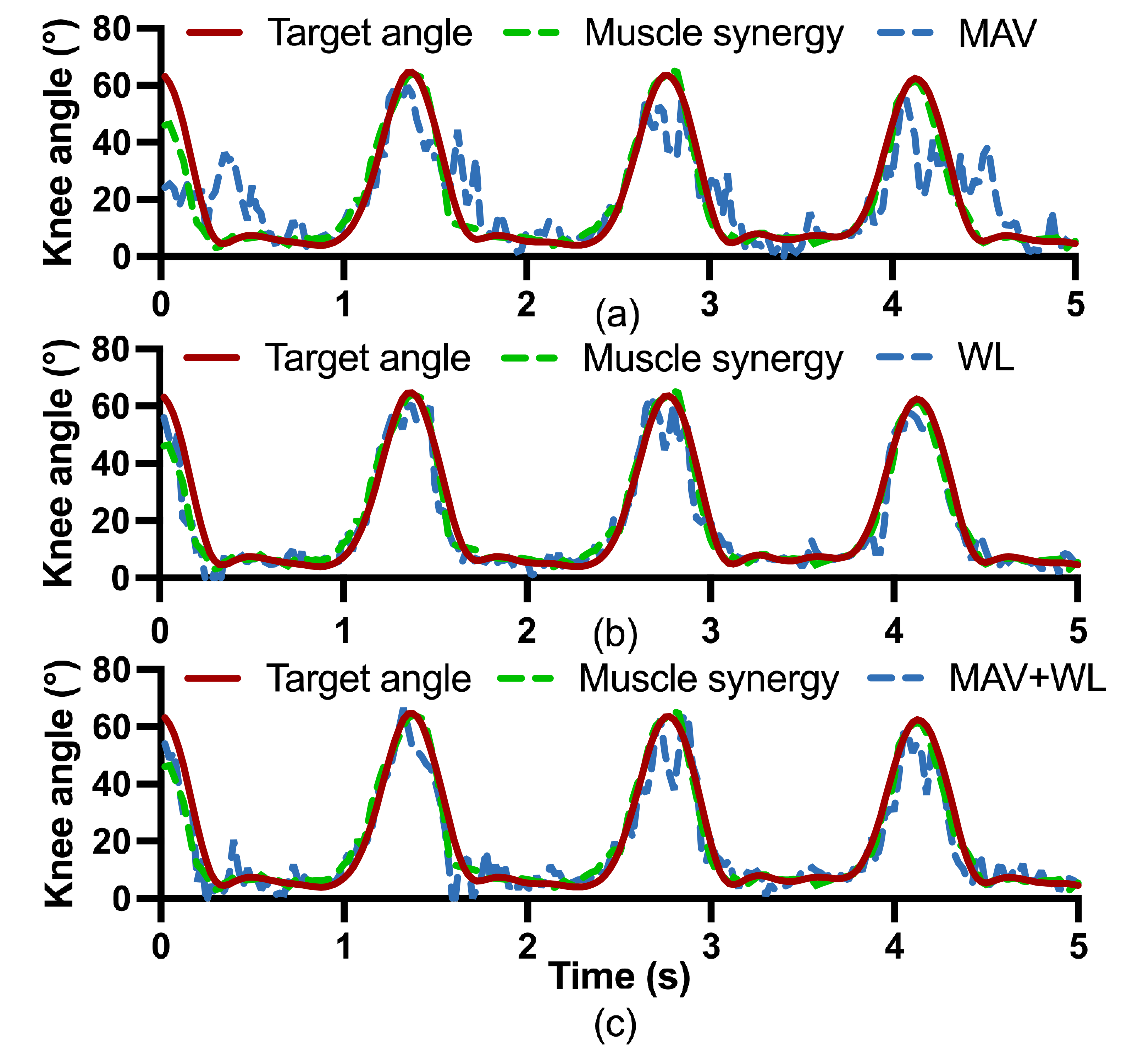
圖2. 步態模式膝關節角度預測結果
?
圖3. 不同步行速度下預測準確性統計結果
? ? ? ?南方科技大學為論文第一通訊單位,碩士研究生鐘文娟、付學明為論文共同第一作者,張明明為唯一通訊作者。研究得到國家自然科學基金及廣東省自然科學基金等項目的資助。
? ? ? ?原文鏈接:https://ieeexplore.ieee.org/document/9735420
撰文:鐘文娟
審核:張明明
編輯:肖然

廣東省深圳市南山區學苑大道1088號
bme@sustech.edu.cn

關注微信公眾號