? ? ? ?在機器人輔助的下肢運動康復訓練中,如何使外骨骼實時識別地形的變化并實現精準步態輔助?近日, 由南方科技大學生物醫學工程系張明明副教授指導的本科生與碩士生,以共同第一作者身份在國際TOP期刊IEEE Journal of Biomedical and Health Informatics發表了研究論文 “Predicting Continuous Locomotion Modes via Multidimensional Feature Learning from sEMG”。該研究提出一個針對人體步態意圖預測的算法框架,獲得了連續步態預測與生活化地形遷移能力。該論文共同第一的兩位作者(本科生、研究生)分別獲得美國馬里蘭大學帕克分校和英國愛丁堡大學的全額獎學金博士項目資助。
? ? ? ?為實現對人體下肢的運動意圖預測,提高下肢外骨骼在不同地形下的步態輔助控制策略的適應性。本團隊提出了一種基于表面肌電(sEMG)信號的多維特征學習模型,通過端對端自動提取并學習時-空-頻三個維度的sEMG信號特征,建立與下肢動作的映射關系,實現了連續步態意圖預測。此外,研究提出的Adaptive Voting方法,在連續數據窗的預測結果中捕捉步態變化趨勢,有效減少了預測結果中的擾動。本研究通過步態預測精度與提前預測時間進行了模型性能評估。
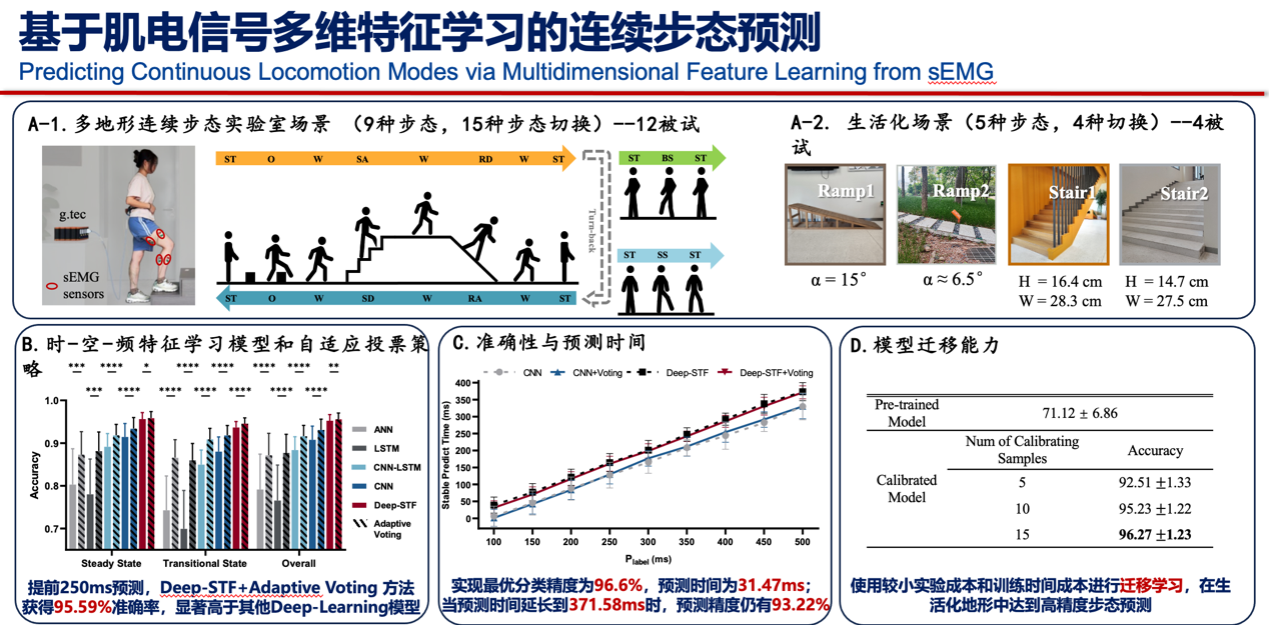
? ? ? ?本研究探究了9種連續步態的預測(站立,跨越障礙,平地行走,上樓梯,下樓梯,上坡,下坡,側跨步,后退步),其中涉及15個步態切換。通過12位被試者的研究數據驗證表明,本方法有效提升了步態預測的準確率與魯棒性。提前250ms預測時,Deep-STF+Adaptive Voting 方法獲得95.58%準確率,顯著高于SVM等機器學習方法和CNN等深度學習方法。其中,研究提出的Adaptive Voting方法,結構簡單,易于與各種深度網絡結合,提高了深度學習網絡的預測結果魯棒性。此外,通過不同的數據滑窗策略,本方法實現最優分類精度為96.6%,預測時間為31.47ms;當預測時間延長到371.58ms時,預測精度仍有93.22%。除了實驗室場景的步態實驗,通過小實驗樣本校準,本模型在4個生活化場景的新地形中得到很好的步態預測效果,達到96.27%準確率。
? ? ? ?本項目獲得國家重點研發計劃項目支持,與天津大學孟琳老師和中科院深圳先進院邰艷龍老師團隊展開項目合作交流。此外,本項目在國家級“大創計劃”中獲準立項。課題小組成員分別為本科生付沛文、張昱陽,熊雯萱以及碩士研究生鐘文娟。經張明明老師與林雨洲博士的指導,不斷探索,團結合作,克服困難,不斷打磨完成研究論文的書寫與發表。
? ? ? ?在項目末期,團隊成員均獲得了豐富的科研經歷與成果。其中,付沛文和鐘文娟同學分別被馬里蘭大學帕克分校和愛丁堡大學的全獎博士項目錄取,張昱陽同學獲得保研名額并繼續留在本團隊深造,熊雯萱同學已前往新加坡國立大學進行為期兩年的本碩“1+1”課程學習。
南方科技大學腦-機器人康復技術實驗室PI簡介:
張明明,IEEE Senior Member,南方科技大學生物醫學工程系長聘副教授/博士生導師,腦-機器人康復技術實驗室PI。主要研究方向包括康復機器人及力反饋觸覺控制技術、人機物理與神經交互,和基于肌電/腦電信號的智能識別算法等。相關成果以第一或通訊作者身份發表在TFS、TII、TIE、T-Mech、TASE、TIM、TNSRE、RAL、JBHI、TBME、JNE、J NEUROENG REHABIL、J BIOMECH、ICRA/IROS等國際知名期刊或學術會議上,共計100余篇;已申請海內外專利40余項(授權20余項),出版英文專著1本。2019年起,擔任高水平學術期刊IEEE TASE、IEEE TNSRE、IEEE RAL、IEEE TMRB編委等。國際學術報告10余次,包括在2021 IEEE RCAR做題為“任務導向性機器人輔助康復技術”的Keynote Talk等。近5年先后主持國家自然科學基金2項、科技部重點研發計劃青年科學家項目、廣東省杰青等重要課題。

廣東省深圳市南山區學苑大道1088號
bme@sustech.edu.cn

關注微信公眾號